Gnss/Rtk Antenna/High-Precision Antenna
12 Years Of Accumulation In The Satellite Navigation Industry
National Service Hotline:
188-2651-7057
12 Years Of Accumulation In The Satellite Navigation Industry
188-2651-7057

2025-04-23
RTK (Real Time Kinematic) positioning technology is a high-precision satellite navigation technology. Compared to traditional GPS positioning technology, RTK can provide positioning results within a centimeter level accuracy range. This makes RTK technology widely used in fields such as unmanned aerial vehicles, autonomous driving, engineering surveying, and agricultural machinery automation.
The core of RTK technology is to use the relative position difference between two or more GNSS receivers (such as GPS, Beidou, GLONASS, etc.) to correct position data in real time. Through high-precision carrier phase difference algorithm, RTK can reduce the error of traditional satellite positioning from a few meters to centimeters.
一、 The working principle of RTK positioning
The principle of RTK positioning is based on carrier phase difference technology. Unlike traditional pseudorange difference technology (such as DGPS), RTK utilizes the carrier phase information in GNSS signals. The workflow can be summarized as the following steps:
1. Configuration of base stations and mobile stations
RTK systems typically consist of two key components: a reference station and a rover station. The GPS receiver of the reference station is installed at a known precise location, calculates real-time error data by receiving satellite signals, and transmits this error information to the mobile station. Mobile stations are installed on targets that require real-time positioning, such as drones or mechanical equipment.
2. Carrier phase difference
Both base stations and mobile stations receive carrier signals from satellites. Traditional GPS mainly relies on pseudorange information (time delay of signals) to calculate position, while RTK uses the phase difference of carriers to improve positioning accuracy. The wavelength of the carrier wave is relatively short (about 19 centimeters), so by calculating the precise difference in carrier phase, centimeter level positioning can be achieved.
3. Error correction and real-time transmission
The benchmark station calculates the error between itself and the mobile station, and sends the differential data to the mobile station through wireless radio or network. After receiving these error data, the mobile station combines its own GNSS signal to correct the positioning results in real time, achieving high-precision positioning effect.
4. Real time calculation and output
After receiving differential data, the mobile station uses RTK algorithm to calculate and output high-precision positioning data. This process is real-time, ensuring that the position accuracy of the mobile station is always maintained at the centimeter level.

2、 Composition of RTK system
The RTK system consists of the following key components:
1. Reference station
The reference station is a GNSS receiver installed at a known precise location. Its main function is to receive satellite signals and calculate error data, and transmit this error information to the mobile station. Reference stations typically require stable power support and are equipped with high-precision antennas and wireless communication devices.
2. Mobile station
The mobile station is a GNSS receiver installed on target objects requiring high-precision positioning, such as unmanned aerial vehicles, autonomous vehicle, agricultural machinery, etc. The mobile station adjusts its position in real-time by receiving differential data from the reference station.
3. Data transmission equipment
The data transmission between the base station and the mobile station is usually achieved through wireless radio stations, mobile networks (such as 4G/5G), or Wi Fi. RTK requires extremely high real-time performance, therefore the stability and speed of data transmission equipment are crucial to the performance of RTK.
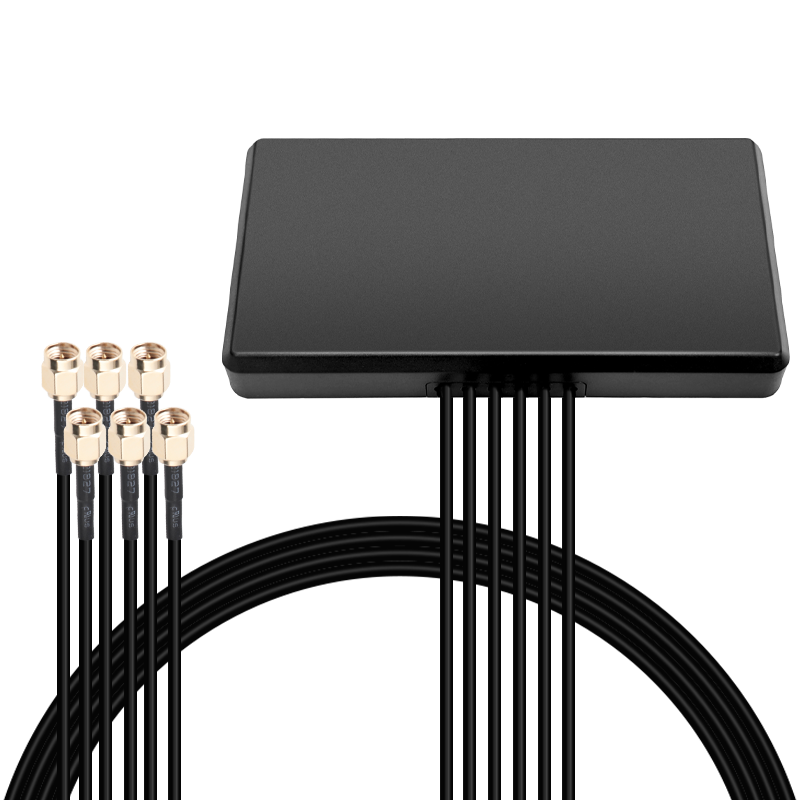
4. Antenna system
GNSS antenna is one of the key hardware components of RTK system, responsible for receiving signals from satellites. The accuracy and anti-interference ability of the antenna have a direct impact on the stability of the RTK system. To ensure accuracy, antennas are usually installed in suitable positions at the reference station and mobile station to ensure the quality of signal reception.
5. Control software and processing algorithms
The software in the RTK system is responsible for processing carrier phase data, calculating position differences, and performing error correction. Software algorithms are the core part of the entire system, determining its accuracy and response speed.
3、 Application scenarios of RTK technology
RTK technology is widely used in multiple fields due to its high-precision positioning capability, including:
1. Unmanned aerial vehicle navigation and surveying
RTK technology can provide high-precision positioning information for drones, ensuring accurate positioning during precise surveying tasks, especially in high-precision data collection scenarios such as terrain mapping and building surveying.
2. Autonomous driving and lane keeping
Autonomous vehicle need real-time and accurate positioning information. RTK can provide centimeter level position information for vehicles to ensure that they can maintain correct lanes in complex road environments.
3. Agricultural machinery automation
In precision agriculture, RTK technology is used for automatic navigation, precise sowing and harvesting of agricultural machinery, reducing crop losses and improving operational efficiency.
4. Engineering surveying and topographic survey
RTK technology is widely used in high-precision surveying tasks in civil engineering, especially in the construction process of large-scale projects, where RTK provides reliable real-time positioning information.
RTK positioning technology can achieve positioning accuracy within centimeter level range through high-precision carrier phase difference technology. Its system composition includes reference stations, mobile stations, data transmission equipment, antenna systems, and software algorithms, which are applied to multiple high-precision positioning scenarios. With the continuous development of GNSS technology, the application prospects of RTK technology in fields such as unmanned aerial vehicles and autonomous driving will become even broader.
4 The specific working principle of carrier phase difference method in RTK positioning technology
The carrier phase difference method in RTK (Real Time Kinematic) positioning technology is a high-precision real-time dynamic positioning method, and its specific working principle is as follows:
Reference Station and User Station: The RTK system consists of a reference station and multiple user stations. The reference station is equipped with a high-precision GPS receiver, which can accurately measure the carrier phase of satellite signals and transmit this data to the user station through a data link.
Carrier phase observation: The reference station obtains real-time carrier phase observation of GPS satellite signals and sends it along with its own known coordinate information to the user station.
Differential correction: After receiving data from the reference station, the user station calculates the carrier phase difference between the two. This differential value is used to correct the carrier phase received by the user station, in order to eliminate the impact of common error sources such as satellite orbit errors, satellite clock errors, atmospheric delays, and multipath effects.
Coordinate calculation: The carrier phase data after differential correction is used to calculate the position coordinates of the user station. Due to the use of high-precision carrier phase measurement and real-time differential correction, centimeter level positioning accuracy can ultimately be achieved.
Real time processing: The entire process is carried out in real-time, that is, at the same time as the user station receives the reference station data, it can immediately perform differential correction and solve for new coordinate positions, thus meeting the requirements for high precision and fast response in engineering operations.
5、 The problem of ionospheric and tropospheric delay in RTK positioning system
RTK (Real Time Kinematic) systems are affected by ionospheric and tropospheric delays when performing high-precision positioning. The main methods to solve this problem include the following:
The global ionospheric grid map can be used to constrain the ionospheric delay parameters with prior values, thereby accelerating the convergence speed of ambiguity. This method corrects ionospheric delay parameters by referring to the ionospheric prior information calculated by NRTK or PPP-RTK of the reference station network.
Common experience correction models include Klobuchar model and GIM model. These models can estimate delays based on known ionospheric conditions and make corresponding corrections.
For RTK systems with large altitude differences, due to the inability to estimate tropospheric delay in real time, it is usually necessary to introduce external models to correct tropospheric delay errors. For example, the empirical global tropospheric delay model can be used to calculate the tropospheric delay of mobile stations and reference stations.
Non differential combination PPP technology extracts ionospheric delay values and ZTD tropospheric delay values from regional tracking network observation data through coordinate constraints and fixed ambiguity. This method is suitable for real-time requirements, where each epoch generates a set of ionospheric models and tropospheric parameters. The user end receives atmospheric model parameters from the server and uses atmospheric parameter constraints to achieve real-time, fast, and high-precision PPP-RTK positioning.
Real time adjustment of ionospheric delay in long-range RTK positioning can be achieved through stochastic modeling methods. This method considers the real-time characteristics of the ionosphere in the original observations and determines a stochastic model for ionospheric delay. By processing data from different baselines in both static and dynamic modes, the positioning accuracy can be significantly improved.
For network RTK positioning, the vertical electron total of the reference station network is first calculated, and then the vertical electron total at the user station is interpolated to estimate and correct the user ionospheric delay.
6、 The role of dual frequency receiver in RTK system in improving positioning accuracy
The dual frequency receiver in RTK (Real Time Kinematic) system plays a crucial role in improving positioning accuracy. Its working principle and function can be explained in detail from the following aspects:
1. Working principle
Dual frequency RTK technology uses two satellite signal carriers of different frequencies, typically in the L1 and L2 frequency bands. The carrier signals of these frequencies will be affected by phase differences, thus measuring the time delay of the satellite signal propagation path. By comparing the propagation time differences of signals at different frequencies, the position of the receiver can be calculated more accurately.
In the measurement error of GNSS (Global Navigation Satellite System), ionospheric errors account for a large part. Dual frequency carrier utilizes the correlation between ionospheric delay and electromagnetic waves of different frequencies to eliminate most ionospheric errors. This mechanism significantly improves the positioning accuracy.
The RTK algorithm and integrated navigation algorithm run efficiently on the on-chip processor, combined with data from MEMS inertial sensors, using multidimensional extended Kalman filtering technology and other specific algorithms to achieve high-precision navigation and attitude measurement functions. This method not only improves positioning accuracy, but also maintains continuous navigation output in complex environments.
2. The role of improving positioning accuracy
By using dual frequency RTK technology, the receiver can achieve centimeter level or even sub centimeter level positioning accuracy. This is crucial for application scenarios that require high-precision positioning, such as engineering surveying, autonomous driving, etc.
Dual frequency carriers can be redundant with each other, and when one frequency is interfered with or the signal quality decreases, the other frequency can still provide reliable positioning information. This greatly enhances the stability and reliability of the system.
In complex environments such as urban canyons, tunnels, and underground parking lots, traditional single frequency GNSS systems may not be able to provide accurate positioning information. The dual frequency RTK system, due to its high precision and strong anti-interference ability, can maintain uninterrupted navigation output throughout the entire route in these environments.
The dual frequency RTK receiver significantly improves positioning accuracy and system stability and reliability by simultaneously receiving satellite signals of two different frequencies and compensating for phase differences and ionospheric effects between these signals.







Tel:188-2651-7057(Mr. Yan) Phone:0755-23205219
Email:yqh@hx-iot.com
Company Address:2-5 Floors, West Of Building C10, Xin'an Second Industrial Zone, Gushu 2nd Road, Xixiang, Bao'an District, Shenzhen
Factory Address:No. 667 Huancheng South Road, Chengnan Industrial Park, Yuanzhou District, Yichun City, Jiangxi Province
Official Website:www.hxrf-antenna.com






 Follow Us
Follow Us 188-2651-7057
188-2651-7057 Online Service
Online Service Enterprise Email
Enterprise Email